 My core research is at the intersection of robotics, control and estimation theory, and
optimization with an emphasis on enhancing real-time autonomy of robotic systems. In the past, I have worked on many different hardware
platforms including a lunar rover, an aerobatic helicopter, and a quadrotor helicopter. Through my experiences, I have realized that
theoretical research and hardware platforms as well as large scale applications should be and are intertwined.
My core research is at the intersection of robotics, control and estimation theory, and
optimization with an emphasis on enhancing real-time autonomy of robotic systems. In the past, I have worked on many different hardware
platforms including a lunar rover, an aerobatic helicopter, and a quadrotor helicopter. Through my experiences, I have realized that
theoretical research and hardware platforms as well as large scale applications should be and are intertwined.
You'll find a more detailed description of some of my research below.
STARMAC Quadrotor
 The Stanford Testbed of Autonomous Rotorcraft for Multi-Agent Control (STARMAC) is a fleet of small, lightweight, low
cost, unmanned aerial vehicles that we are using to demonstrate new concepts in multi agent control. Each vehicle
can carry a variety of sensors, including a kinect sensor, laser range-finder, stereo/mono camera and avalanche rescue beacon sensor.
The Stanford Testbed of Autonomous Rotorcraft for Multi-Agent Control (STARMAC) is a fleet of small, lightweight, low
cost, unmanned aerial vehicles that we are using to demonstrate new concepts in multi agent control. Each vehicle
can carry a variety of sensors, including a kinect sensor, laser range-finder, stereo/mono camera and avalanche rescue beacon sensor.
STARMAC was one of the first successful autonomous quadrotor platforms and has been used in a variety of experiments: search and rescue,
decentralized collision avoidance, stochastic and deterministic motion planning, sensor placement, autonomous landing and robust controller synthesis.
Most recently, we demonstrated successful aerobatic maneuvers with theoretical guarantees on safety. To successfully complete a backflip maneuver we analyzed the system to provide conditions on the quadrotor's state that ensured, even with disturbances, it could safely return to a stable hovering condition. This was accomplished by modeling the quadrotor in a hybrid dynamics framework for the design of guaranteed safe switching regions which were constructed using reachable sets calculated via a Hamilton-Jacobi differential game formulation. A video explanation is shown below on the right.
| STARMAC Overview Video | Backflip Explanation Video |
|
|
|
|---|---|
|
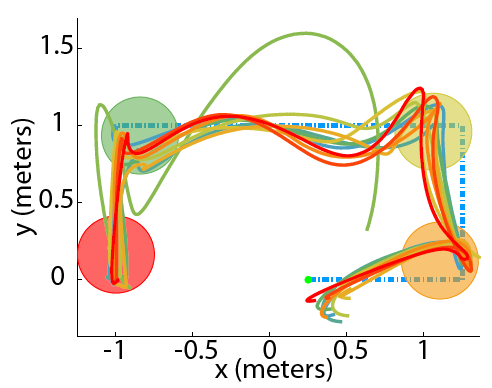
Stochastic Motion Planning
With the advances in technology of robotic systems, there has been a growing number of robots deployed to perform challenging tasks such as:
search and rescue, reconnaissance, surveillance, and disaster response. In all of these tasks, there is a pressing need for algorithms to plan
safe trajectories through complex environments. In the planning process the system cannot be assumed to be deterministic, rather the inherit
uncertainty of the system must be accounted for explicitly in order to maximize the success of the resulting plan. |
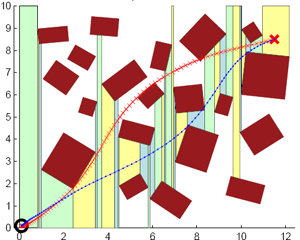
Motion Planning
Randomized methods, such as probabilistic roadmaps, have been proposed to solve the obstacle avoidance problem, particularly
for instances with a very large number of constraints. However, the resulting paths are generally not optimized in distance or time,
and can result in winding paths if the vehicle dynamics are incorporated. Formulations using mixed interger linear programming (MILP)
have been proposed which provide the optimal solution, but suffer from scalability issues as the number of obstacles, and hence the
number of integer variables, increases. |
|
|
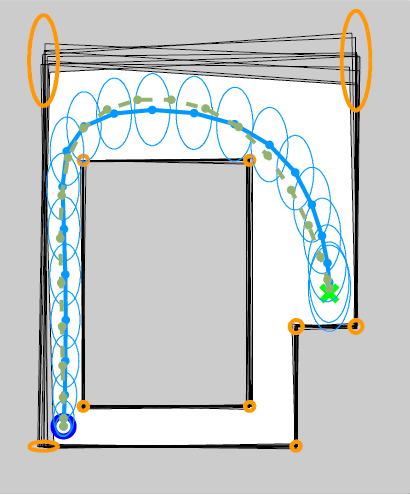
Sensor Placement for Improved Robotic Navigation
The sensor deployment problem involves a set of fixed sensors used to estimate the vehicle state (e.g. position, orientation and velocity)
while attempting to follow a pre-planned trajectory through the environment. Since the sensor can only provide
a measurement to the vehicle when it is within range, the deployment of the sensors will have a major impact on the ability of the
vehicle to follow the trajectory. The problem addressed here is to optimally place the sensors in the environment to maximize the
probability of the vehicle successfully following the intended trajectory. To prevent an overconfident solution, the
uncertainty of the vehicle's state is taken into account in determining whether it can receive a measurement from a sensor.
|
| Planning without uncertainty | Planning with uncertainty |
|
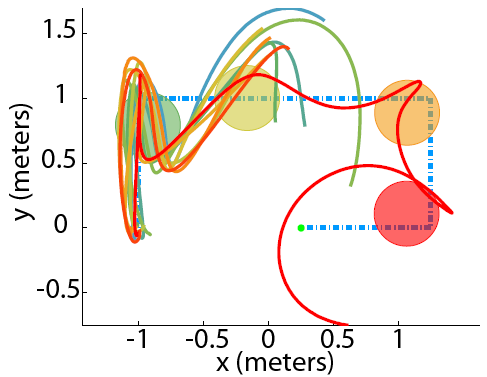
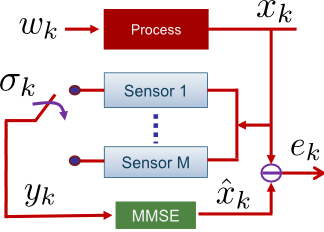
Optimal Scheduling of Kalman Filters
The sensor scheduling problem consists of selecting a subset of the available sensors to estimate the system state while reducing the
estimation cost (e.g. energy consumption and communication overheads). Many motivating applications can benefit from this technology, for example:
(a) tracking building occupants to enable energy efficient control for adjusting power settings, (b) interference between
sensors such as with sonar sensors used in terrain relative navigation, (c) path planning for active sensing in uncertain environments. |
Collision Avoidance Algorithms for AircraftThe goal of the Next Generation Air Transportation System (NGATS) is to increase the capacity of the National AirSpace (NAS) while increasing the efficiency and safety of the airspace. Currently, there are many collision avoidance algorithms that exist or are being developed for different time scales. Even though each individual algorithm may provide safety between the aircraft, when combined to form a hybrid collision avoidance system for all time scales, safety cannot be guaranteed. Therefore to facilitate NGATS, methods need to be developed for analyzing the interaction between airborne collision avoidance systems and tactical separation assurance tools in Air Traffic Control (ATC). Furthermore, procedures need to be designed to guarantee that these collision avoidance and separation assurance tools do not conflict with each other, but rather operate together safely and efficiently. This interoperability of collision avoidance functions is integral to the design of NGATS. |
|

|
Dark Navigation
This project is part of CMU's Lunar Rover Initiative. It is developing Scarab to evaluate and demonstrate a combined
drilling and science rover platform for lunar exploration. One of the major goals of the rover is to explore dark and
permanently shadowed zones, such as the interior of polar craters on the Moon. For a robotic explorer to operate in
these areas, the robot must be capable of navigating in unstructured, natural terrain with little (or no) ambient
illumination. This requires appropriate sensing to determine the robot's position, to detect obstacles/hazards,
and to safely control autonomous motions. My work designed, developed, and implemented terrain analysis techniques
for planar laser scanners. The algorithms were successfully tested on over 500m of autonomous driving. |
|
GPS Positioning System for an Aerobatic Helicopter
When a helicopter is under autonomous control, it obtains information from a suite of instruments, which typically
include a single GPS receiver. GPS has to maintain a line-of-sight to at least 4 satellites to provide a reliable
estimate of the helicopter's position. If the helicopter is performing aggressive aerobatic maneuvers, the single
GPS receiver is constantly losing line-of-sight to the satellites, and therefore it will not be able provide a reliable
estimate of the helicopter's position. |

|